Robotics Engineer focused on Embedded hardware, automation, and R&D prototyping.
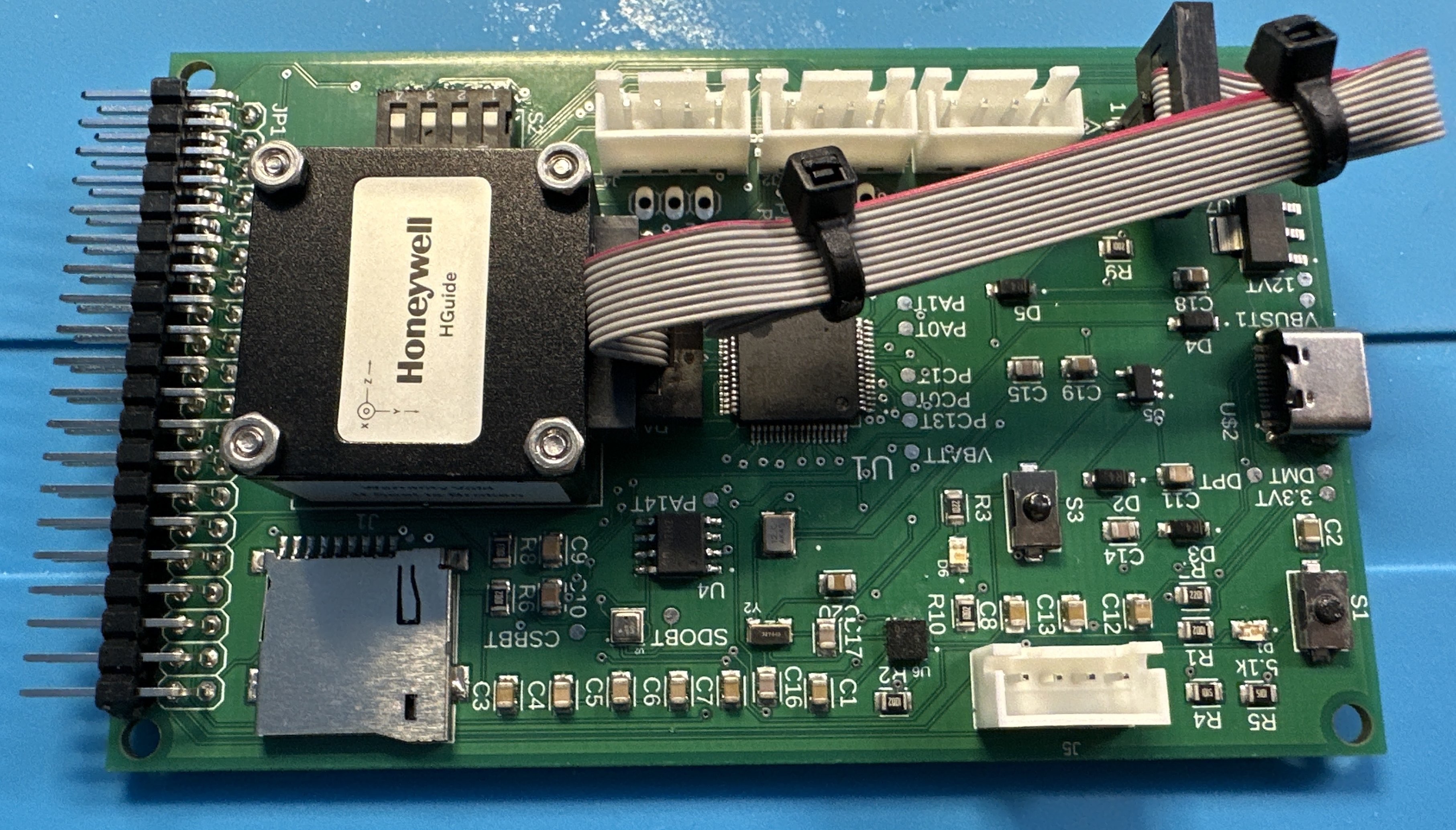
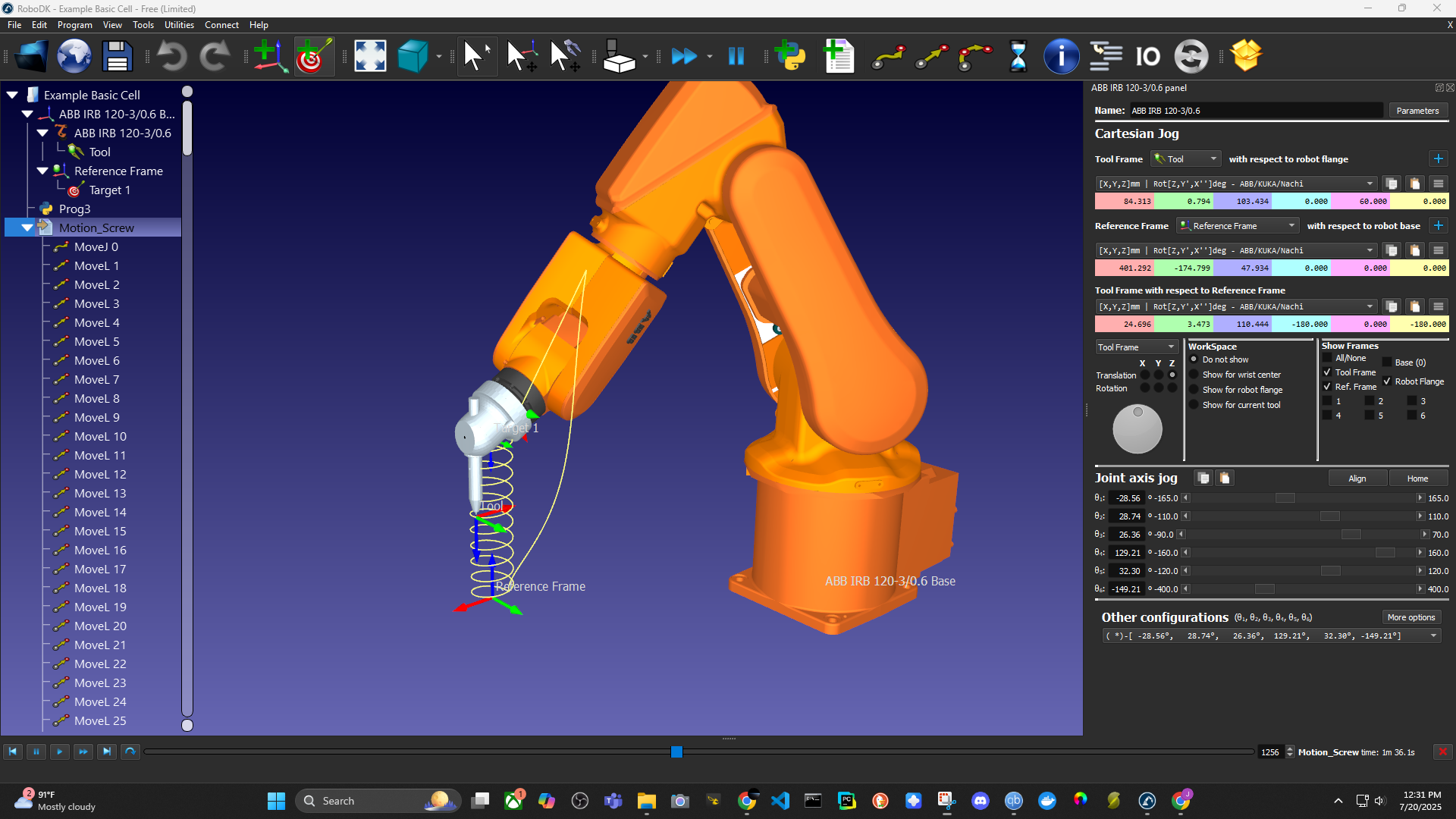
I design and prototype PCBs, integrate sensors, and build embedded systems that modernize equipment and enable new capabilities. My interests span robotics and UAS flight control, but the consistent theme is engineering innovation with disciplined iteration.
Featured Projects
A curated set that best represents my direction in embedded systems, robotics/UAS, and prototype-driven engineering.

Engineering workflow
The throughline across my work is repeatable iteration: define the problem, prototype quickly, test hard, and refine until it’s reliable.
Clarify the objective, constraints, and what “good” looks like. Identify the fastest path to a measurable prototype.
Partition hardware/firmware, define interfaces, and plan safe states. Power budget and IO plan first.
Breadboard/dev board and quick CAD fixtures. Build the minimum that validates the key risks early.
Schematic → layout → bring-up. Sensor integration, comms validation, and mechanical fit for real-world use.
Bench testing with instrumentation. Capture failures, reproduce issues, and validate fixes with data.
Refine for reliability: cleanup, documentation, and repeatability. Improve performance only after stability.
Toolchain
Tools and interfaces I actively use. This is designed to be easy to update over time (and you can drop logos into each category later).
- PIC32
- STM32
- ESP32
- Raspberry Pi
- KiCad
- Eagle
- Fusion 360 (PCB + Mechanical)
- Bambu X1C (rapid fixtures/enclosures)
- C (MPLAB focus)
- MPLAB
- STM32Cube
- Arduino
- CircuitPython
- UART
- SPI
- I2C
- Ethernet
- Wi-Fi
- Bench power supplies
- Multimeter (DMM)
- Oscilloscope
- SMD soldering + rework
- 3D-printed fixtures
- Enclosures
- Custom parts / adapters
- Prototype-driven documentation
Just one more thing…

“I’ll be back.”